DLinear 模型使用离线批量推理进行验证#

本教程演示了如何使用 DLinear 模型和 Ray Data 执行批量推理。该过程包括加载模型检查点、准备测试数据、批量运行推理以及评估性能。
请注意,此笔记本需要前一个“DLinear 时间序列模型的分布式训练”笔记本生成的预训练模型工件。
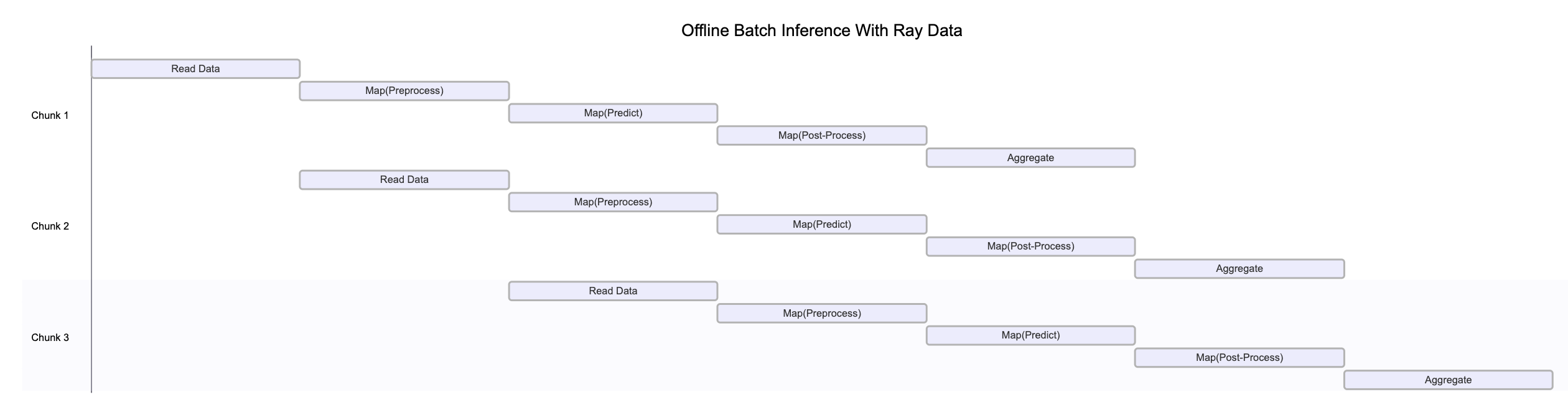
上图说明了数据块如何在管道的各个阶段并行处理。这种并行执行最大限度地提高了资源利用率和吞吐量。
请注意,此图表出于多种原因进行了简化
每个数据管道阶段只有一个工作进程
反压机制可能会限制上游运算符,以防止下游阶段过载
动态重分区通常发生在数据流经管道时,改变块的数量和大小
随着集群自动伸缩,可用资源会发生变化
系统故障可能会中断图中所示的整洁顺序流程
❌ 传统的批量执行,非流式处理,例如没有流水线处理的 Spark 或 SageMaker Batch Transform
将整个数据集读入内存或持久的中间格式
然后才开始应用转换,例如
.map、.filter等。更高的内存压力和启动延迟
✅ Ray Data 的流式执行
在加载块后立即开始处理,无需等待整个数据集
减少内存占用,防止内存不足错误,并加快首次输出时间
通过减少空闲时间来提高资源利用率
能够以最小的延迟实现类似在线的推理管道
注意:Ray Data 以流式执行的批量处理方式运行,而不是像 Flink 或 Kafka Streams 这样的实时流处理引擎。这种方法对于迭代式机器学习工作负载、ETL 管道以及训练或推理前的预处理特别有用。与 Spark 和 SageMaker Batch Transform 等解决方案相比,Ray 通常能提供 2-17 倍的吞吐量提升。
# Enable importing from e2e_timeseries module.
import os
import sys
sys.path.insert(0, os.path.abspath(os.path.join(os.getcwd())))
首先设置环境和导入
import numpy as np
import ray
import torch
os.environ["RAY_TRAIN_V2_ENABLED"] = "1"
import e2e_timeseries
from e2e_timeseries.data_factory import data_provider
from e2e_timeseries.metrics import metric
from e2e_timeseries.model import DLinear
使用 e2e_timeseries 模块初始化 Ray 集群,以便新生成的 worker 可以导入它。
ray.init(runtime_env={"py_modules": [e2e_timeseries]})
接下来,设置 DLinear 模型配置和作业配置
# Load the best checkpoint path from the metadata file created in the training notebook.
best_checkpoint_metadata_fpath = os.path.join(
"/mnt/cluster_storage/checkpoints", "best_checkpoint_path.txt"
)
with open(best_checkpoint_metadata_fpath, "r") as f:
best_checkpoint_path = f.read().strip()
config = {
"checkpoint_path": best_checkpoint_path,
"num_data_workers": 1,
"features": "S",
"target": "OT",
"smoke_test": False,
"seq_len": 96,
"label_len": 48,
"pred_len": 96,
"individual": False,
"batch_size": 64,
"num_predictor_replicas": 4,
}
def _process_config(config: dict) -> dict:
"""Helper function to process and update configuration."""
# Configure encoder input size based on task type.
if config["features"] == "M" or config["features"] == "MS":
config["enc_in"] = 7 # ETTh1 has 7 features when multi-dimensional prediction is enabled
else:
config["enc_in"] = 1
# Ensure paths are absolute.
config["checkpoint_path"] = os.path.abspath(config["checkpoint_path"])
config["num_gpus_per_worker"] = 1.0
config["train_only"] = False # Load test subset
return config
# Set derived values.
config = _process_config(config)
数据摄取#
首先,将测试数据集加载为 Ray Data Dataset。使用 .show(1) 来触发单行的执行,因为 Ray Data 是惰性求值的。
ray.init(ignore_reinit_error=True)
print("Loading test data...")
ds = data_provider(config, flag="test")
ds.show(1)
此单元定义了 Predictor 类。它从检查点加载训练好的 DLinear 模型,并处理输入批次以生成预测。call 方法对给定的 NumPy 数组批次执行推理。
Ray Data 的基于 actor 的处理允许仅加载一次模型权重并将其传输到 GPU,并在批次之间重复使用它们。
class Predictor:
"""Actor class for performing inference with the DLinear model."""
def __init__(self, checkpoint_path: str, config: dict):
self.config = config
self.device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# Load model from checkpoint.
self.model = DLinear(config).float()
checkpoint = torch.load(checkpoint_path, map_location=self.device)
self.model.load_state_dict(checkpoint["model_state_dict"])
self.model.to(self.device)
self.model.eval()
def __call__(self, batch: dict[str, np.ndarray]) -> dict:
"""Process a batch of data for inference (numpy batch format)."""
# Convert input batch to tensor.
batch_x = torch.from_numpy(batch["x"]).float().to(self.device)
with torch.no_grad():
outputs = self.model(batch_x) # Shape (N, pred_len, features_out)
# Determine feature dimension based on config.
f_dim = -1 if self.config["features"] == "MS" else 0
outputs = outputs[:, -self.config["pred_len"] :, f_dim:]
outputs_np = outputs.cpu().numpy()
# Extract the target part from the batch.
batch_y = batch["y"]
batch_y_target = batch_y[:, -self.config["pred_len"] :]
return {"predictions": outputs_np, "targets": batch_y_target}
ds = ds.map_batches(
Predictor,
fn_constructor_kwargs={"checkpoint_path": config["checkpoint_path"], "config": config},
batch_size=config["batch_size"],
concurrency=config["num_predictor_replicas"],
num_gpus=config["num_gpus_per_worker"],
batch_format="numpy",
)
接下来,进行一些小的后处理,以获得所需维度的结果。
def postprocess_items(item: dict) -> dict:
# Squeeze singleton dimensions for predictions and targets if necessary.
if item["predictions"].shape[-1] == 1:
item["predictions"] = item["predictions"].squeeze(-1)
if item["targets"].shape[-1] == 1:
item["targets"] = item["targets"].squeeze(-1)
return item
ds = ds.map(postprocess_items)
最后,执行所有这些惰性步骤,并使用 take_all() 将它们具体化到内存中。
# Trigger the lazy execution of the entire Ray pipeline.
all_results = ds.take_all()
现在结果已在内存中,为训练好的 DLinear 模型计算一些验证指标。
# Concatenate predictions and targets from all batches.
all_predictions = np.concatenate([item["predictions"] for item in all_results], axis=0)
all_targets = np.concatenate([item["targets"] for item in all_results], axis=0)
# Compute evaluation metrics.
mae, mse, rmse, mape, mspe, rse = metric(all_predictions, all_targets)
print("\n--- Test Results ---")
print(f"MSE: {mse:.3f}")
print(f"MAE: {mae:.3f}")
print(f"RMSE: {rmse:.3f}")
print(f"MAPE: {mape:.3f}")
print(f"MSPE: {mspe:.3f}")
print(f"RSE: {rse:.3f}")
print("\nOffline inference finished!")