入门#
Ray 是一个用于扩展 AI 和 Python 应用的开源统一框架。它提供了一个简单通用的 API,用于构建可从笔记本电脑扩展到集群的分布式应用。
什么是 Ray?#
Ray 通过提供以下功能简化了分布式计算:
可扩展的计算原语:任务和 actor,实现无痛并行编程
专业的 AI 库:用于常见 ML 工作负载的工具,如数据处理、模型训练、超参数调优和模型服务
统一资源管理:自动资源处理,实现从笔记本电脑到云端的无缝扩展
选择你的路径#
选择符合你需求的指南:
扩展 ML 工作负载:Ray Libraries 快速入门
扩展通用 Python 应用:Ray Core 快速入门
部署到云端:Ray 集群快速入门
调试和监控应用:调试和监控快速入门

Ray AI Libraries 快速入门#
使用独立的库处理 ML 工作负载。每个库专注于 ML 工作流的特定部分,从数据处理到模型服务。点击下方与你的工作负载对应的下拉菜单。
 Data:用于 ML 的可扩展数据集
Data:用于 ML 的可扩展数据集
Ray Data 提供针对机器学习和 AI 工作负载优化的分布式数据处理。它能有效地通过数据管道流式传输数据。
下面是使用 Ray Data 扩展离线推理和训练数据摄取的示例。
注意
要运行此示例,请安装 Ray Data
pip install -U "ray[data]"
from typing import Dict
import numpy as np
import ray
# Create datasets from on-disk files, Python objects, and cloud storage like S3.
ds = ray.data.read_csv("s3://anonymous@ray-example-data/iris.csv")
# Apply functions to transform data. Ray Data executes transformations in parallel.
def compute_area(batch: Dict[str, np.ndarray]) -> Dict[str, np.ndarray]:
length = batch["petal length (cm)"]
width = batch["petal width (cm)"]
batch["petal area (cm^2)"] = length * width
return batch
transformed_ds = ds.map_batches(compute_area)
# Iterate over batches of data.
for batch in transformed_ds.iter_batches(batch_size=4):
print(batch)
# Save dataset contents to on-disk files or cloud storage.
transformed_ds.write_parquet("local:///tmp/iris/")
Train:分布式模型训练
Ray Train 使分布式模型训练变得简单。它抽象了在 PyTorch 和 TensorFlow 等流行框架上设置分布式训练的复杂性。
此示例展示了如何将 Ray Train 与 PyTorch 一起使用。
要运行此示例,请安装 Ray Train 和 PyTorch 包
注意
pip install -U "ray[train]" torch torchvision
设置数据集和模型。
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
from torchvision import datasets
from torchvision.transforms import ToTensor
def get_dataset():
return datasets.FashionMNIST(
root="/tmp/data",
train=True,
download=True,
transform=ToTensor(),
)
class NeuralNetwork(nn.Module):
def __init__(self):
super().__init__()
self.flatten = nn.Flatten()
self.linear_relu_stack = nn.Sequential(
nn.Linear(28 * 28, 512),
nn.ReLU(),
nn.Linear(512, 512),
nn.ReLU(),
nn.Linear(512, 10),
)
def forward(self, inputs):
inputs = self.flatten(inputs)
logits = self.linear_relu_stack(inputs)
return logits
现在定义你的单 worker PyTorch 训练函数。
def train_func():
num_epochs = 3
batch_size = 64
dataset = get_dataset()
dataloader = DataLoader(dataset, batch_size=batch_size)
model = NeuralNetwork()
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(model.parameters(), lr=0.01)
for epoch in range(num_epochs):
for inputs, labels in dataloader:
optimizer.zero_grad()
pred = model(inputs)
loss = criterion(pred, labels)
loss.backward()
optimizer.step()
print(f"epoch: {epoch}, loss: {loss.item()}")
此训练函数可以使用以下方式执行:
train_func()
将其转换为分布式多 worker 训练函数。
使用 ray.train.torch.prepare_model 和 ray.train.torch.prepare_data_loader 工具函数设置模型和数据进行分布式训练。这会自动将模型包装在 DistributedDataParallel 中并放置在正确的设备上,并向 DataLoaders 添加 DistributedSampler。
import ray.train.torch
def train_func_distributed():
num_epochs = 3
batch_size = 64
dataset = get_dataset()
dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=True)
dataloader = ray.train.torch.prepare_data_loader(dataloader)
model = NeuralNetwork()
model = ray.train.torch.prepare_model(model)
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(model.parameters(), lr=0.01)
for epoch in range(num_epochs):
if ray.train.get_context().get_world_size() > 1:
dataloader.sampler.set_epoch(epoch)
for inputs, labels in dataloader:
optimizer.zero_grad()
pred = model(inputs)
loss = criterion(pred, labels)
loss.backward()
optimizer.step()
print(f"epoch: {epoch}, loss: {loss.item()}")
实例化一个包含 4 个 worker 的 TorchTrainer,并使用它运行新的训练函数。
from ray.train.torch import TorchTrainer
from ray.train import ScalingConfig
# For GPU Training, set `use_gpu` to True.
use_gpu = False
trainer = TorchTrainer(
train_func_distributed,
scaling_config=ScalingConfig(num_workers=4, use_gpu=use_gpu)
)
results = trainer.fit()
要使用 GPU 加速训练作业,请确保已配置 GPU,然后将 use_gpu 设置为 True。如果你没有 GPU 环境,Anyscale 提供了一个集成了自动伸缩 GPU 集群的开发工作空间,可用于此目的。

此示例展示了如何使用 Ray Train 设置 使用 Keras 的多 worker 训练。
要运行此示例,请安装 Ray Train 和 Tensorflow 包
注意
pip install -U "ray[train]" tensorflow
设置数据集和模型。
import sys
import numpy as np
if sys.version_info >= (3, 12):
# Tensorflow is not installed for Python 3.12 because of keras compatibility.
sys.exit(0)
else:
import tensorflow as tf
def mnist_dataset(batch_size):
(x_train, y_train), _ = tf.keras.datasets.mnist.load_data()
# The `x` arrays are in uint8 and have values in the [0, 255] range.
# You need to convert them to float32 with values in the [0, 1] range.
x_train = x_train / np.float32(255)
y_train = y_train.astype(np.int64)
train_dataset = tf.data.Dataset.from_tensor_slices(
(x_train, y_train)).shuffle(60000).repeat().batch(batch_size)
return train_dataset
def build_and_compile_cnn_model():
model = tf.keras.Sequential([
tf.keras.layers.InputLayer(input_shape=(28, 28)),
tf.keras.layers.Reshape(target_shape=(28, 28, 1)),
tf.keras.layers.Conv2D(32, 3, activation='relu'),
tf.keras.layers.Flatten(),
tf.keras.layers.Dense(128, activation='relu'),
tf.keras.layers.Dense(10)
])
model.compile(
loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True),
optimizer=tf.keras.optimizers.SGD(learning_rate=0.001),
metrics=['accuracy'])
return model
现在定义你的单 worker TensorFlow 训练函数。
def train_func():
batch_size = 64
single_worker_dataset = mnist_dataset(batch_size)
single_worker_model = build_and_compile_cnn_model()
single_worker_model.fit(single_worker_dataset, epochs=3, steps_per_epoch=70)
此训练函数可以使用以下方式执行:
train_func()
现在将其转换为分布式多 worker 训练函数。
设置全局批处理大小 - 每个 worker 处理与单 worker 代码中相同大小的批处理。
选择你的 TensorFlow 分布式训练策略。此示例使用
MultiWorkerMirroredStrategy。
import json
import os
def train_func_distributed():
per_worker_batch_size = 64
# This environment variable will be set by Ray Train.
tf_config = json.loads(os.environ['TF_CONFIG'])
num_workers = len(tf_config['cluster']['worker'])
strategy = tf.distribute.MultiWorkerMirroredStrategy()
global_batch_size = per_worker_batch_size * num_workers
multi_worker_dataset = mnist_dataset(global_batch_size)
with strategy.scope():
# Model building/compiling need to be within `strategy.scope()`.
multi_worker_model = build_and_compile_cnn_model()
multi_worker_model.fit(multi_worker_dataset, epochs=3, steps_per_epoch=70)
实例化一个包含 4 个 worker 的 TensorflowTrainer,并使用它运行新的训练函数。
from ray.train.tensorflow import TensorflowTrainer
from ray.train import ScalingConfig
# For GPU Training, set `use_gpu` to True.
use_gpu = False
trainer = TensorflowTrainer(train_func_distributed, scaling_config=ScalingConfig(num_workers=4, use_gpu=use_gpu))
trainer.fit()
要使用 GPU 加速训练作业,请确保已配置 GPU,然后将 use_gpu 设置为 True。如果你没有 GPU 环境,Anyscale 提供了一个集成了自动伸缩 GPU 集群的开发工作空间,可用于此目的。
Tune:大规模超参数调优
Ray Tune 是一个用于任何规模超参数调优的库。它使用高效的分布式搜索算法自动为模型找到最佳超参数。使用 Tune,你可以在不到 10 行代码中启动多节点分布式超参数扫描,支持包括 PyTorch、TensorFlow 和 Keras 在内的任何深度学习框架。
注意
要运行此示例,请安装 Ray Tune
pip install -U "ray[tune]"
此示例使用迭代训练函数运行一个小型网格搜索。
from ray import tune
def objective(config): # ①
score = config["a"] ** 2 + config["b"]
return {"score": score}
search_space = { # ②
"a": tune.grid_search([0.001, 0.01, 0.1, 1.0]),
"b": tune.choice([1, 2, 3]),
}
tuner = tune.Tuner(objective, param_space=search_space) # ③
results = tuner.fit()
print(results.get_best_result(metric="score", mode="min").config)
如果安装了 TensorBoard (pip install tensorboard),你可以自动可视化所有试验结果
tensorboard --logdir ~/ray_results
Serve:可扩展模型服务
Ray Serve 为 ML 模型和业务逻辑提供可扩展和可编程的服务。部署任何框架的模型,实现生产就绪的性能。
注意
要运行此示例,请安装 Ray Serve 和 scikit-learn
pip install -U "ray[serve]" scikit-learn
此示例服务于一个 scikit-learn 梯度提升分类器。
import requests
from starlette.requests import Request
from typing import Dict
from sklearn.datasets import load_iris
from sklearn.ensemble import GradientBoostingClassifier
from ray import serve
# Train model.
iris_dataset = load_iris()
model = GradientBoostingClassifier()
model.fit(iris_dataset["data"], iris_dataset["target"])
@serve.deployment
class BoostingModel:
def __init__(self, model):
self.model = model
self.label_list = iris_dataset["target_names"].tolist()
async def __call__(self, request: Request) -> Dict:
payload = (await request.json())["vector"]
print(f"Received http request with data {payload}")
prediction = self.model.predict([payload])[0]
human_name = self.label_list[prediction]
return {"result": human_name}
# Deploy model.
serve.run(BoostingModel.bind(model), route_prefix="/iris")
# Query it!
sample_request_input = {"vector": [1.2, 1.0, 1.1, 0.9]}
response = requests.get(
"https://:8000/iris", json=sample_request_input)
print(response.text)
响应显示 {"result": "versicolor"}。
RLlib:工业级强化学习
RLlib 是一个强化学习 (RL) 库,提供流行 RL 算法的高性能实现,并支持各种训练环境。RLlib 为各种工业和研究应用提供高可扩展性和统一 API。
注意
要运行此示例,请安装 rllib 以及 tensorflow 或 pytorch
pip install -U "ray[rllib]" tensorflow # or torch
你可能还需要在系统上安装 CMake。
import gymnasium as gym
import numpy as np
import torch
from typing import Dict, Tuple, Any, Optional
from ray.rllib.algorithms.ppo import PPOConfig
# Define your problem using python and Farama-Foundation's gymnasium API:
class SimpleCorridor(gym.Env):
"""Corridor environment where an agent must learn to move right to reach the exit.
---------------------
| S | 1 | 2 | 3 | G | S=start; G=goal; corridor_length=5
---------------------
Actions:
0: Move left
1: Move right
Observations:
A single float representing the agent's current position (index)
starting at 0.0 and ending at corridor_length
Rewards:
-0.1 for each step
+1.0 when reaching the goal
Episode termination:
When the agent reaches the goal (position >= corridor_length)
"""
def __init__(self, config):
self.end_pos = config["corridor_length"]
self.cur_pos = 0.0
self.action_space = gym.spaces.Discrete(2) # 0=left, 1=right
self.observation_space = gym.spaces.Box(0.0, self.end_pos, (1,), np.float32)
def reset(
self, *, seed: Optional[int] = None, options: Optional[Dict] = None
) -> Tuple[np.ndarray, Dict]:
"""Reset the environment for a new episode.
Args:
seed: Random seed for reproducibility
options: Additional options (not used in this environment)
Returns:
Initial observation of the new episode and an info dict.
"""
super().reset(seed=seed) # Initialize RNG if seed is provided
self.cur_pos = 0.0
# Return initial observation.
return np.array([self.cur_pos], np.float32), {}
def step(self, action: int) -> Tuple[np.ndarray, float, bool, bool, Dict]:
"""Take a single step in the environment based on the provided action.
Args:
action: 0 for left, 1 for right
Returns:
A tuple of (observation, reward, terminated, truncated, info):
observation: Agent's new position
reward: Reward from taking the action (-0.1 or +1.0)
terminated: Whether episode is done (reached goal)
truncated: Whether episode was truncated (always False here)
info: Additional information (empty dict)
"""
# Walk left if action is 0 and we're not at the leftmost position
if action == 0 and self.cur_pos > 0:
self.cur_pos -= 1
# Walk right if action is 1
elif action == 1:
self.cur_pos += 1
# Set `terminated` flag when end of corridor (goal) reached.
terminated = self.cur_pos >= self.end_pos
truncated = False
# +1 when goal reached, otherwise -0.1.
reward = 1.0 if terminated else -0.1
return np.array([self.cur_pos], np.float32), reward, terminated, truncated, {}
# Create an RLlib Algorithm instance from a PPOConfig object.
print("Setting up the PPO configuration...")
config = (
PPOConfig().environment(
# Env class to use (our custom gymnasium environment).
SimpleCorridor,
# Config dict passed to our custom env's constructor.
# Use corridor with 20 fields (including start and goal).
env_config={"corridor_length": 20},
)
# Parallelize environment rollouts for faster training.
.env_runners(num_env_runners=3)
# Use a smaller network for this simple task
.training(model={"fcnet_hiddens": [64, 64]})
)
# Construct the actual PPO algorithm object from the config.
algo = config.build_algo()
rl_module = algo.get_module()
# Train for n iterations and report results (mean episode rewards).
# Optimal reward calculation:
# - Need at least 19 steps to reach the goal (from position 0 to 19)
# - Each step (except last) gets -0.1 reward: 18 * (-0.1) = -1.8
# - Final step gets +1.0 reward
# - Total optimal reward: -1.8 + 1.0 = -0.8
print("\nStarting training loop...")
for i in range(5):
results = algo.train()
# Log the metrics from training results
print(f"Iteration {i+1}")
print(f" Training metrics: {results['env_runners']}")
# Save the trained algorithm (optional)
checkpoint_dir = algo.save()
print(f"\nSaved model checkpoint to: {checkpoint_dir}")
print("\nRunning inference with the trained policy...")
# Create a test environment with a shorter corridor to verify the agent's behavior
env = SimpleCorridor({"corridor_length": 10})
# Get the initial observation (should be: [0.0] for the starting position).
obs, info = env.reset()
terminated = truncated = False
total_reward = 0.0
step_count = 0
# Play one episode and track the agent's trajectory
print("\nAgent trajectory:")
positions = [float(obs[0])] # Track positions for visualization
while not terminated and not truncated:
# Compute an action given the current observation
action_logits = rl_module.forward_inference(
{"obs": torch.from_numpy(obs).unsqueeze(0)}
)["action_dist_inputs"].numpy()[
0
] # [0]: Batch dimension=1
# Get the action with highest probability
action = np.argmax(action_logits)
# Log the agent's decision
action_name = "LEFT" if action == 0 else "RIGHT"
print(f" Step {step_count}: Position {obs[0]:.1f}, Action: {action_name}")
# Apply the computed action in the environment
obs, reward, terminated, truncated, info = env.step(action)
positions.append(float(obs[0]))
# Sum up rewards
total_reward += reward
step_count += 1
# Report final results
print(f"\nEpisode complete:")
print(f" Steps taken: {step_count}")
print(f" Total reward: {total_reward:.2f}")
print(f" Final position: {obs[0]:.1f}")
# Verify the agent has learned the optimal policy
if total_reward > -0.5 and obs[0] >= 9.0:
print(" Success! The agent has learned the optimal policy (always move right).")
Ray Core 快速入门#

Ray Core 提供简单的原语,用于构建和运行分布式应用。它使你只需几行代码,即可将普通的 Python 或 Java 函数和类转换为分布式的无状态任务和有状态 actor。
下面的示例展示了如何:
将 Python 函数转换为 Ray 任务以进行并行执行
将 Python 类转换为 Ray actor 以进行分布式有状态计算
Core:使用 Ray 任务并行化函数
注意
要运行此示例,请安装 Ray Core
pip install -U "ray"
导入 Ray 并使用 ray.init() 进行初始化。然后使用 @ray.remote 装饰器修饰函数,声明你要远程运行此函数。最后,使用 .remote() 调用该函数,而不是正常调用。此远程调用会生成一个 future,即 Ray 对象引用,你可以使用 ray.get 来获取实际结果。
import ray
ray.init()
@ray.remote
def f(x):
return x * x
futures = [f.remote(i) for i in range(4)]
print(ray.get(futures)) # [0, 1, 4, 9]
注意
要运行此示例,请在项目中添加 ray-api 和 ray-runtime 依赖项。
使用 Ray.init 初始化 Ray 运行时。然后使用 Ray.task(...).remote() 将任何 Java 静态方法转换为 Ray 任务。任务在远程 worker 进程中异步运行。remote 方法返回一个 ObjectRef,你可以使用 get 获取实际结果。
import io.ray.api.ObjectRef;
import io.ray.api.Ray;
import java.util.ArrayList;
import java.util.List;
public class RayDemo {
public static int square(int x) {
return x * x;
}
public static void main(String[] args) {
// Initialize Ray runtime.
Ray.init();
List<ObjectRef<Integer>> objectRefList = new ArrayList<>();
// Invoke the `square` method 4 times remotely as Ray tasks.
// The tasks run in parallel in the background.
for (int i = 0; i < 4; i++) {
objectRefList.add(Ray.task(RayDemo::square, i).remote());
}
// Get the actual results of the tasks.
System.out.println(Ray.get(objectRefList)); // [0, 1, 4, 9]
}
}
在上面的代码块中,我们定义了一些 Ray 任务。虽然它们非常适合无状态操作,但有时你必须维护应用程序的状态。你可以使用 Ray Actor 来实现这一点。
Core:使用 Ray Actor 并行化类
Ray 提供 actor,允许你在 Python 或 Java 中并行化类的实例。当你实例化一个 Ray actor 类时,Ray 会在集群中启动该类的远程实例。然后,这个 actor 可以执行远程方法调用并维护自己的内部状态。
注意
要运行此示例,请安装 Ray Core
pip install -U "ray"
import ray
ray.init() # Only call this once.
@ray.remote
class Counter(object):
def __init__(self):
self.n = 0
def increment(self):
self.n += 1
def read(self):
return self.n
counters = [Counter.remote() for i in range(4)]
[c.increment.remote() for c in counters]
futures = [c.read.remote() for c in counters]
print(ray.get(futures)) # [1, 1, 1, 1]
注意
要运行此示例,请在项目中添加 ray-api 和 ray-runtime 依赖项。
import io.ray.api.ActorHandle;
import io.ray.api.ObjectRef;
import io.ray.api.Ray;
import java.util.ArrayList;
import java.util.List;
import java.util.stream.Collectors;
public class RayDemo {
public static class Counter {
private int value = 0;
public void increment() {
this.value += 1;
}
public int read() {
return this.value;
}
}
public static void main(String[] args) {
// Initialize Ray runtime.
Ray.init();
List<ActorHandle<Counter>> counters = new ArrayList<>();
// Create 4 actors from the `Counter` class.
// These run in remote worker processes.
for (int i = 0; i < 4; i++) {
counters.add(Ray.actor(Counter::new).remote());
}
// Invoke the `increment` method on each actor.
// This sends an actor task to each remote actor.
for (ActorHandle<Counter> counter : counters) {
counter.task(Counter::increment).remote();
}
// Invoke the `read` method on each actor, and print the results.
List<ObjectRef<Integer>> objectRefList = counters.stream()
.map(counter -> counter.task(Counter::read).remote())
.collect(Collectors.toList());
System.out.println(Ray.get(objectRefList)); // [1, 1, 1, 1]
}
}
Ray 集群快速入门#
将你的应用程序部署到 AWS、GCP、Azure 等平台上的 Ray 集群,通常只需对现有代码进行少量修改。
Clusters:在 AWS 上启动 Ray 集群
Clusters:在 Kubernetes 上启动 Ray 集群
Ray 程序可以在单节点 Kubernetes 集群上运行,也可以无缝扩展到更大的集群。
Clusters:在 Anyscale 上启动 Ray 集群
Anyscale 是 Ray 背后的公司。Anyscale 平台在你的 AWS、GCP、Azure 或本地 Kubernetes 集群之上提供了企业级的 Ray 部署。
调试和监控快速入门#
使用内置的可观测性工具监控和调试 Ray 应用程序和集群。这些工具帮助你理解应用程序的性能并识别瓶颈。
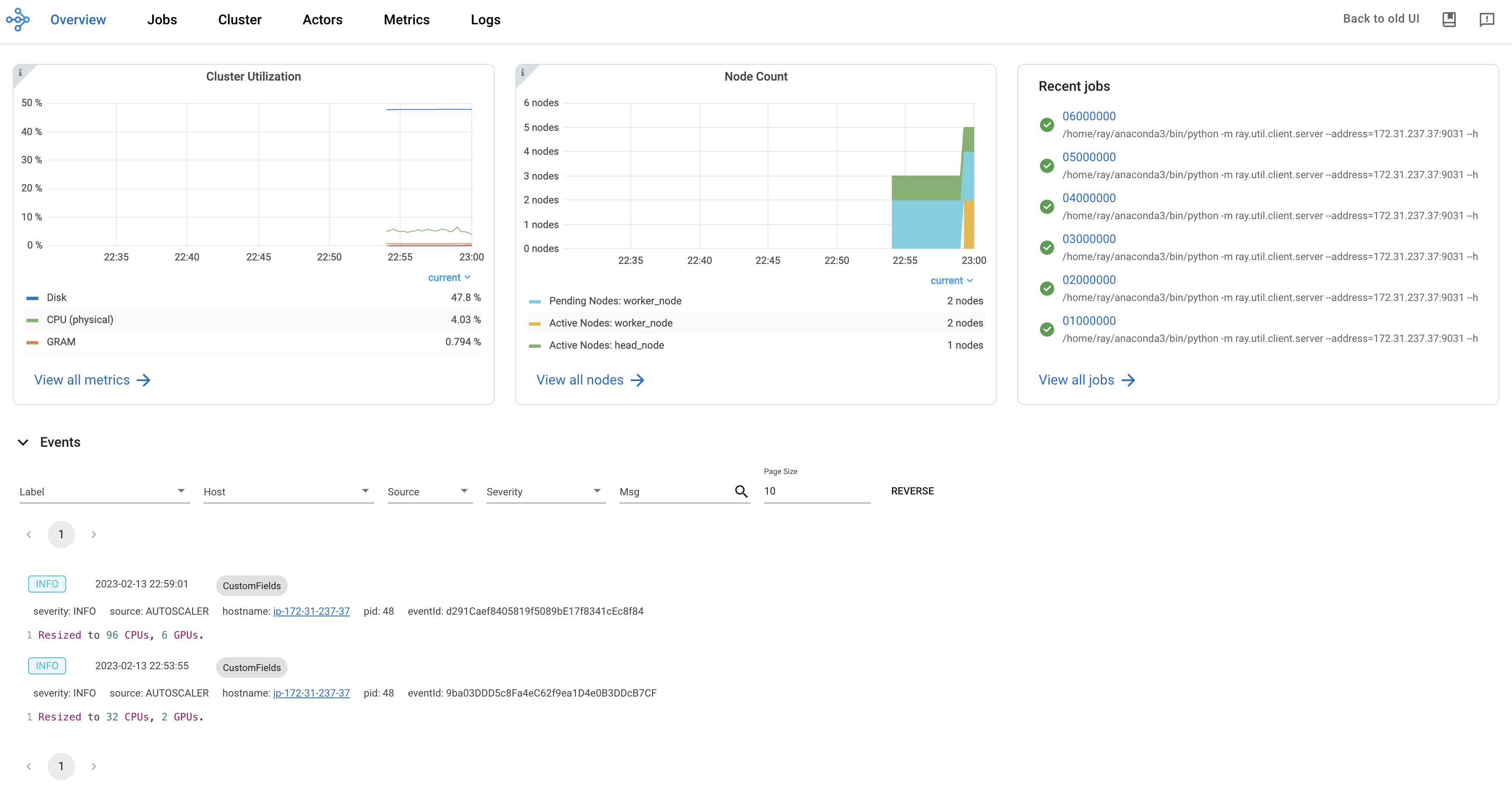
Ray Dashboard:用于监控和调试 Ray 的 Web GUI
Ray dashboard 提供了一个可视化界面,显示实时系统指标、节点级资源监控、作业性能分析和任务可视化。该仪表板旨在帮助用户理解 Ray 应用程序的性能并识别潜在问题。
注意
要开始使用 dashboard,请按如下方式进行默认安装:
pip install -U "ray[default]"
运行 Ray 脚本时,dashboard 会自动可用。通过默认 URL https://:8265 访问 dashboard。
Ray State APIs:用于访问集群状态的命令行界面
Ray State APIs 允许用户通过命令行界面或 Python SDK 方便地访问 Ray 的当前状态(快照)。
注意
要开始使用 state API,请按如下方式进行默认安装:
pip install -U "ray[default]"
运行以下代码。
import ray
import time
ray.init(num_cpus=4)
@ray.remote
def task_running_300_seconds():
print("Start!")
time.sleep(300)
@ray.remote
class Actor:
def __init__(self):
print("Actor created")
# Create 2 tasks
tasks = [task_running_300_seconds.remote() for _ in range(2)]
# Create 2 actors
actors = [Actor.remote() for _ in range(2)]
ray.get(tasks)
在终端中使用 ray summary tasks 查看 Ray 任务的汇总统计信息。
ray summary tasks
======== Tasks Summary: 2022-07-22 08:54:38.332537 ========
Stats:
------------------------------------
total_actor_scheduled: 2
total_actor_tasks: 0
total_tasks: 2
Table (group by func_name):
------------------------------------
FUNC_OR_CLASS_NAME STATE_COUNTS TYPE
0 task_running_300_seconds RUNNING: 2 NORMAL_TASK
1 Actor.__init__ FINISHED: 2 ACTOR_CREATION_TASK
了解更多#
Ray 拥有丰富的资源生态系统,可帮助你了解更多关于分布式计算和 AI 扩展的信息。
博客和新闻#
视频#
幻灯片#
论文#
如果遇到技术问题,请在 Ray 讨论区发帖。对于一般问题、公告和社区讨论,请加入 Slack 上的 Ray 社区。